自制遥控机械臂
今年双十一入手了一台3D打印机,我从网上下载了好几个模型,打印效果非常不错:

然而,总是下载别人设计好的模型直接打印,感觉没有发挥出我自身的设计能力。因此我决定自己动手,设计3D模型。
在网上看了一圈科普,发现3D模型设计大概分两类:
- 使用ZBrush、Blender这样的建模软件创作艺术类模型,主要用于电影、游戏、手办等;
- 使用SolidWorks、Fusion360这样的工业建模软件创建精确的工业产品模型,可以设计家具、生活用品、机器人等。
考虑到我自己的艺术天赋有限,自然是选择更加困难的工业设计。因此,为了能设计3D模型并用3D打印机打印出来,我决定先掌握SolidWorks这个工业设计软件。
在B站上搜了一下SolidWorks教程,发现阿奇老师的SolidWorks教程很受欢迎,我花了一周的时间快速学习了一下,顺利设计出小抽屉、摇头小风扇:

总结一下SolidWorks建模的核心,就是掌握草图绘制,制作零件,最后用装配体完成装配并模拟机械运动,检查确保没有干涉后,完成最终3D模型。
SolidWorks,轻松拿下!
接下来要挑战高难度的机器人设计,虽然我的最终目标是人形机器人,但还是要遵循循序渐进的原则,先从入门级的机械臂开始,正好阿奇老师还有一门收费的机械臂课程,再花一周时间快速学习,顺利完成机械臂模型:

和课程原版机械臂相比,主要改动如下:
- 去掉同步带轮,改成齿轮驱动;
- 简化了一下夹爪,用3个齿轮驱动。
遗憾的是,这个教程虽然能实现最终的机械臂设计,但并没有完成MCU控制与软件操控的功能。不过,这就到咱的专业领域了。
B站上有很多操控机械臂的例子,最常见的是通过电脑连USB线,或者手机来操作。然而,用鼠标或者触控屏幕来控制舵机,只能在开发阶段用,作为产品,是完全不合格的。要轻松地操控机械臂,必须使用无线手柄遥控。因此,我梳理了一下机械臂的产品需求如下:
- 使用无线手柄遥控机械臂,无需借助电脑或手机作为主机中转;
- 必须内置MCU主控芯片,并且需要支持无线连接;
- 如果使用WiFi连接,则需要接入一个现有的无线网并配置IP,不如蓝牙方便易用。
所以,最终方案确定使用蓝牙手柄,通过蓝牙连接到MCU主控,实现操控机械臂。
现在问题来了,MCU芯片哪家强?
首先排除掉上古时代的51,剩下的选手包括:
- STM32:使用ARM Cortex-M 32位CPU;
- Arduino:使用AVR单片机,也有用ARM的产品;
- Pico:树莓派出的自研MCU;
- ESP32:国产MCU,使用LX7或RISC-V的32位CPU。
比较上述产品,我决定最终选择ESP32,因为它不仅是国产精品,而且在一个芯片里集成了WiFi和蓝牙,以及各种外设通信协议,性价比极高!这意味着不需要任何额外的模块,就可以直接实现蓝牙连接!
在淘宝上找到最便宜的ESP32C3 Mini开发板,价格仅10~20元左右,可以说完全吊打STM32、Arduino和Pico:

因此,MCU主控就选择ESP32C3,外加一个舵机驱动板PCA9685,一个蓝牙手柄(型号待定)。
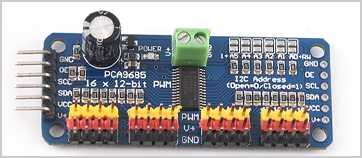
这里说明一下,为什么我们需要一个单独的舵机驱动板。因为我们这个机械臂使用的是非常便宜的模拟舵机,通过PWM信号控制。虽然ESP32本身可以输出PWM信号,但是,它内部的PWM引脚是有限的,而PCA9685可以同时输出16路PWM信号,也就是可以同时驱动16个舵机!如果需要驱动更多的舵机,还可以级联扩展。此外,驱动多个舵机需要给舵机稳定地供电,不能从ESP32的板子上引出电源,而PCA9685驱动板自带供电输入,免去了我们再单独找一个电源板的麻烦。
ESP32+PCA9685控制舵机的原理如下:
ESP32通过I2C接口向PCA9685发送控制命令,PCA9685会根据控制命令生成PWM信号来控制舵机,这样,我们在编写程序时,只需发送控制命令,无需使用定时器来生成PWM信号,能大大简化控制程序的开发。
接下来要选择蓝牙手柄。在仔细阅读了ESP32C3的相关文档后,我发现蓝牙协议还挺复杂的,最早的蓝牙1.0诞生于1999年,而现在广泛使用的蓝牙4.x和5.x分别诞生于2010年和2016年,它们与之前版本的重要区别在于引入了低功耗(Low Energy)蓝牙,简称BLE(Bluetooth Low Energy),而传统蓝牙被称为经典蓝牙(Classic BR/EDR),这两种协议采用的协议栈几乎不重叠,可以把它俩看作是两种不同的协议。
因此,在涉及到支持蓝牙的具体硬件时,它可以支持以下任意一种或多种协议:
- BR/EDR 4.x;
- BR/EDR 5.x;
- BLE 4.x;
- BLE 5.x。
手机和电脑通常会同时支持BR/EDR和BLE(即双模蓝牙),但蓝牙外设如鼠标、耳机、闹钟等,一般仅支持某一种协议。根据ESP32的官方选型手册,ESP32C3仅支持BLE 5.0,因此,我们必须选择支持BLE 5.0的蓝牙手柄。目前,市面上大多数的游戏手柄仅支持经典蓝牙,我在淘宝上问了一圈客服,得到肯定答复的只有这一家名叫盖世小鸡的手柄,因此,最终选择他家的启明星无线手柄,不到100元拿下:

软件开发环境
针对ESP32,可以选择的开发环境如下:
- 使用官方的ESP-IDF配合Eclipse或VSCode,编译器采用GCC;
- 使用Arduino IDE,使用简化的C++;
- 使用MicroPython。
如果使用MicroPython,那么通常我们是在应用层开发,这要求固件包含基本的系统和MicroPython运行环境。使用MicroPython最大的问题是,如果要使用的硬件没有现成的驱动,那么我们仍然要用C为MicroPython编写调用接口。此外,MicroPython的运行效率比C要差很多。
使用Arduino IDE开发时,最大的优势是可以使用Arduino丰富的第三方库,缺点是Arduino本身太简单了,简单到连操作系统都没有,入门容易,但并不便于开发复杂的程序。而ESP32官方提供的ESP-IDF开发环境,用CMake和GCC编译,运行在FreeRTOS系统上,可以说开发难度最高,但也最灵活,因为我们可以完全控制底层。
综上分析,我们选择难度拉满,使用ESP-IDF和VSCode开发环境,直接写C代码。这里不需要用到C++是因为C++的虚函数和模板这些高级功能在控制硬件时几乎用不上。
连接蓝牙手柄
在蓝牙协议中,互相连接的两个设备被称为Client和Server,但是与互联网的Client/Server相反,蓝牙的Client是PC或手机,Server是耳机等配件。另一种更好的说法是主机(Central)和外设(Peripheral),主机就是PC或手机,外设就是键盘、鼠标、手柄、传感器等。一个主机可以同时和多个外设实现蓝牙连接,但一个外设在某个时间段内只能连接到一个主机。
蓝牙建立连接的过程如下:
- 外设首先要主动向外广播;
- 主机要主动发起扫描,发现正在广播的外设后发起连接请求;
- 外设接受请求后,通过配对建立连接,开始通信;
- 连接从建立到断开期间,外设不再广播。
蓝牙BLE协议实际上比经典蓝牙BR/EDR要简单很多,BLE协议定义了外设能提供的服务(Service),每一个服务都可以通过枚举列出特征(Characteristic),特征分为可读、可写、可订阅等类别,一个温度传感器的某个特征如温度就是可读的,一个闹钟的某个特征如当前时间就是可读可写的,一个手柄的控制按钮就是可订阅的,即用户按下某个键后主机会收到订阅的消息。这些服务和特征用UUID标识,蓝牙标准组织定义了很多通用的ID来标识键盘、鼠标、手柄、温度、湿度、心率等各类传感器,要控制手柄,我们假设厂商预设的ID是符合标准的,所以只需要根据手柄的标准ID就可以读取手柄的输入。
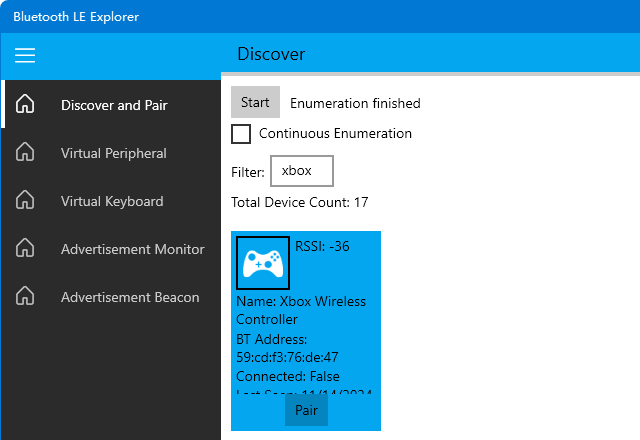
微软官方提供了一个Bluetooth LE Explorer,可以直接从Windows应用商店安装,这样我们可以方便地查看蓝牙BLE手柄的信息:
ESP32C3芯片的角色就是主机,所以我们需要以Host模式启动ESP32C3的蓝牙功能。也可以以外设模式启动ESP32的蓝牙,用外设模式时,我们实际上可以基于ESP32自己开发一个蓝牙手柄或者任何蓝牙外设。
在网上能找到的ESP32连接蓝牙手柄的资料非常少,但好消息是ESP-IDF自带了一个使用Host模式连接HID外设的例子esp-hid-host,HID就是人体工学输入设备(Human Interface Device),手柄、鼠标、键盘都属于HID,直接新建一个ESP-IDF工程并选择使用该模板,我们就得到了一个自动连接手柄的程序。
根据ESP32的官方文档,ESP32支持两种软件协议栈:
- Bluedroid:这是Android系统开源的一个蓝牙协议栈,支持BR/EDR和BLE;
- Nimble:这是Apache开源的一个蓝牙协议栈,它仅支持BLE。
该示例默认使用Bluedroid,也可以改为Nimble,但这里既然跑通了Bluedroid,我就懒得测试Nimble了。
打开手柄并开启配对模式(主动广播),再运行代码,可以自动扫描到名字为Xbox Wireless Controller的手柄,然后自动配对连接,接下来就会不停地打印出手柄的输入:
00 80 ff 7f 00 80 ff 7f 00 00 00 00 00 00 00 00
每次接收的输入数据是16字节,猜测这16字节包含了手柄所有键的状态。我们简单按下手柄不同的按钮和摇杆,就能观察到16字节输入的变化,可以确定各个字节的数据表示如下:
- 第0~3字节:左摇杆的X、Y轴数据;
- 第4~7字节:右摇杆的X、Y轴数据;
- 第8~9字节:左上L2按钮的力度;
- 第10~11字节:右上R2按钮的力度;
- 第13字节:A、B、X、Y、L1、R1按钮;
- 第14字节:View和Menu按钮;
- 其他字节:暂不关心。
摇杆的X、Y轴数据分别用两个小端序的uint16表示,范围是0~0xffff:
(0x0, 0x0) (0xffff, 0x0)
┌───────────────────────┐
│ │
│ │
│ │
│ │
│ │
│ x │
│ (0x8000, 0x7fff) │
│ │
│ │
│ │
│ │
└───────────────────────┘
(0x0, 0xffff) (0xffff, 0xffff)
当摇杆位于中心时,X的坐标是0x8000,Y的坐标是0x7fff,这一点比较奇怪,虽然只差1。
L2按钮的力度用两个uint8表示,第一个uint8范围是0~0xff,表示精确的力度,第二个uint8的范围是0~3,表示较粗的力度。R2同理。
A、B、X、Y、L1和R1编码如下:
- A = 0x01
- B = 0x02
- X = 0x08
- Y = 0x10
- L1 = 0x40
- R1 = 0x80
View和Menu按钮编码如下:
- View = 0x04
- Menu = 0x08
因此,我们可以直接解析这16字节如下:
typedef struct __attribute__((packed)) { // __attribute__((packed))是gcc扩展,表示紧凑字段,不做内存对齐
uint16_t left_stick_x; // 左摇杆
uint16_t left_stick_y;
uint16_t right_stick_x; // 右摇杆
uint16_t right_stick_y;
uint8_t left_trigger; // 左上L2按钮
uint8_t left_trigger_level;
uint8_t right_trigger; // 右上R2按钮
uint8_t right_trigger_level;
uint8_t any_1;
uint8_t buttons; // A,B,X,Y,L1,R1按钮
uint8_t ex_buttons; // VIEW, MENU按钮
uint8_t any_2;
} ctrl_input_data_t;
接下来在示例代码的基础上做如下修改。
默认的示例代码会自动连接扫描到的最后一个HID输入设备,我们改为按名字过滤,仅连接到名字为Xbox Wireless Controller的设备。注意这个名字是通过Bluetooth LE Explorer看到的,如果你的手柄不是这个名字,就改成实际的手柄名字。
然后定义连接状态:
enum CTRL_STATE
{
SCANNING, // 正在扫描
OPENING, // 正在打开
INPUT // 正常输入
};
当未扫描到手柄时,默认的示例代码会自动停止运行,我们改为暂停5秒后继续扫描,死循环不退出:
void hid_scan_task(void *pvParameters)
{
for (;;) {
vTaskDelay(5000 / portTICK_PERIOD_MS);
if (ctrl_state == SCANNING) {
hid_scan();
}
}
}
当连接到手柄后,我们看到接收手柄数据的频率非常快,需要对输入数据按200ms的间隔采样,即每秒钟只接受5次输入:
case ESP_HIDH_INPUT_EVENT: {
// 处理手柄输入:
const uint8_t *bda = esp_hidh_dev_bda_get(param->input.dev);
if (param->input.length == CTRL_INPUT_DATA_LENGTH) {
// 每200ms采样输入:
int64_t now = esp_timer_get_time();
if (now - ctrl_input_time > 200000) {
// 复制输入数据并发送消息到队列:
memcpy(&ctrl_input_data, (char *) param->input.data, CTRL_INPUT_DATA_LENGTH);
xQueueSend(ctrl_input_queue, &ctrl_input_data, 0); // 如果上一次的输入数据还未处理,则不等待直接丢弃
ctrl_input_time = now;
}
}
break;
}
这样我们就可以在另一个任务中从队列取出手柄输入并处理:
void control_task(void *pvParameters)
{
// 从队列取出手柄信号并控制舵机:
ctrl_input_data_t input;
for (;;) {
if (pdTRUE == xQueueReceive(ctrl_input_queue, &input, 0)) {
// TODO: 处理输入
}
// 每读取一次输入后,等待100ms,即每秒仅允许10次输入
vTaskDelay(100 / portTICK_PERIOD_MS);
}
}
现在,蓝牙手柄的连接和输入问题基本解决,下一步是准备通过I2C接口驱动PCA9685并控制舵机。
在网上找了一圈,发现一个用PCA9685控制LED灯的驱动,稍做改造,变成一个控制舵机的驱动,核心函数如下:
// 设置PCA9685的频率:
void pca9685_set_freq(uint16_t freq)
{
// Set prescaler
// calculation on page 25 of datasheet
uint8_t prescale_val = CLOCK_FREQ / (4096 * freq) - 1;
// The PRE_SCALE register can only be set when the SLEEP bit of MODE1 register is set to logic 1.
uint8_t mode1Reg;
uint8_t any;
ESP_ERROR_CHECK(generic_read_two_i2c_register(PCA9685_MODE1_REG, &mode1Reg, &any));
mode1Reg = (mode1Reg & ~PCA9685_MODE1_RESTART) | PCA9685_MODE1_SLEEP;
generic_write_i2c_register(PCA9685_MODE1_REG, mode1Reg);
ESP_ERROR_CHECK(generic_write_i2c_register(PCA9685_PRESCALE_REG, prescale_val));
// It takes 500us max for the oscillator to be up and running once SLEEP bit has been set to logic 0.
mode1Reg = (mode1Reg & ~PCA9685_MODE1_SLEEP) | PCA9685_MODE1_RESTART;
ESP_ERROR_CHECK(generic_write_i2c_register(PCA9685_MODE1_REG, mode1Reg));
vTaskDelay(5 / portTICK_PERIOD_MS);
}
// 设置指定端口的PWM:
void pca9685_set_channel_pwm(uint8_t channel, uint16_t pwm)
{
uint8_t pinAddress = PCA9685_LED0_REG + (channel << 2);
ESP_LOGI(TAG, "set channel %d (addr = %d) pwm: %d", channel, pinAddress, pwm);
ESP_ERROR_CHECK(generic_write_i2c_register_two_words(pinAddress, 0, pwm));
}
使用PWM信号控制舵机的原理非常简单,PWM是一种占空比信号,以常用的180°舵机为例,它要求PWM信号周期为20ms,即50Hz的频率,根据高电平持续时间决定舵机的偏转角度:
- 高电平持续0.5ms,低电平持续20-0.5=19.5ms,舵机旋转角度为0°;
- 高电平持续1.5ms,低电平持续20-1.5=18.5ms,舵机旋转角度为90°;
- 高电平持续2.5ms,低电平持续20-2.5=17.5ms,舵机旋转角度为180°。
控制高电平持续时间的范围0.5~2.5ms,我们就可以在0~180°范围内控制舵机。
PCA9685输出PWM的原理是针对每个舵机通道,内部有两个寄存器,分别存储open(开启高电平)和close(开启低电平)的计数器周期。计数器从0~4095反复计数,假设open=0,close=2047,则每个计数周期我们会得到如下的信号:
┌─────────────┐ ┌─────────────┐ ┌───
│ │ │ │ │
───┘ └─────────────┘ └─────────────┘
0 2047 2048 4095 0 2047 2048 4095 0
可见上述信号占空比恰好为50%。
如果open=0,close=1023,则我们可以得到占空比为25%的PWM信号:
┌──────┐ ┌──────┐ ┌───
│ │ │ │ │
───┘ └────────────────────┘ └────────────────────┘
0 1023 1024 4095 0 1023 1024 4095 0
如果open=100,close=1123,输出的PWM信号占空比仍为25%,但相位变了:
┌──────┐ ┌──────┐ ┌───
│ │ │ │ │
─────┘ └────────────────────┘ └────────────────────┘
0 100 1123 1124 4095 0 100 1123 1124 4095 0 100
有些需要用到相位的控制就可以设定open,这里控制舵机我们不需要相位偏移,因此open始终设置为0,根据close就可方便地计算占空比:
- 要控制舵机到0°,占空比为
0.5/20,计算close=0.5*4096/20-1=101; - 要控制舵机到90°,占空比为
1.5/20,计算close=1.5*4096/20-1=306; - 要控制舵机到180°,占空比为
2.5/20,计算close=2.5*4096/20-1=511; - 要控制舵机到x°,占空比为
(2.5-0.5)*x/180+0.5,计算close=((2.5-0.5)*x/180+0.5)*4096/20-1。
因此,我们输入open=0,close为根据目标角度计算的整数值,就可以控制舵机角度(注意:存在一点误差)。
下一个问题是,舵机要求的PWM信号周期是50Hz,而PCA9685自带的时钟频率高达25MHz,因此,输出的PWM信号周期是25M/4096=6.1KHz,显然不满足50Hz的要求。
解决这个问题是使用分频器,2分频可以把25MHz降为12.5MHz,4分频可以把25MHz降为6.25MHz,而我们需要的频率是50*4096=204.8KHz,分频器计算为25M/204.8K≈122。
因此,当我们调用pca9685_set_freq(50)设置50Hz的频率时,我们并不是把50写入PCA9685,而是先计算分频器的数值,再把这个数值写入PCA9685的寄存器。当我们写入122时,PCA9685内部时钟频率仍为25MHz,但每122个时钟周期才会驱动一次计数,完成从0到4095的完整计数需要122*4096=499712≈500K个时钟周期,正好对应25M/500K=50Hz。
数字芯片内部的寄存器都是整数,我们并不能精确地把频率控制到50Hz。PCA9685官方手册给出的分频器计算公式为:
最后是根据输入的舵机角度计算PWM的close并设置PCA9685的对应寄存器:
// 输入舵机的角度0~180:
void set_servo_pwm(uint8_t channel, int16_t angle)
{
// 计算占空比:
uint32_t pwm = RA_SERVO_PWM_RANGE * (uint32_t)angle / RA_SERVO_ANGLE_RANGE + RA_SERVO_PWM_MIN;
// 设置占空比:
pca9685_set_channel_pwm(channel, (uint16_t) pwm);
}
联调后刷入到ESP32C3,上电测试,如果一切正常,就可以将舵机和板子安装到机械臂中。
现在,用蓝牙手柄遥控机械臂,看看最终效果:

源码
本项目的SolidWorks设计模型和控制代码完全开源,需要的同学自取: